New Launcher Prototype
After our first robot design team meeting, it became apparent we were really leaning towards selecting a horizontal roller launcher design. However, we realized that we hadn’t quite prototyped that kind of design yet. So, before we locked in on it, we decided to create another prototype to confirm the idea.
This prototype features another set of wheels before the flywheels to stabilize the note as it is launched. We also played around with using uneven wheel sizes to add some spin to the note, although this prototype does not implement that idea.
Altogether, this prototype worked quite well with it being able to shoot consistently at a good distance.
Our robot design
Our robot design team met several times this week and spent a lot of time discussing our robot’s design. Due to illness and our uncertainties regarding a climb design, we were slightly delayed, with the final robot design only having been decided this past Saturday.
Let’s start with the intake.

Next, our launcher.
Our launcher design is very similar to the prototype we created earlier in the week. We’re going to attach our launcher to a pivot so that we can both aim our speaker shots and make our amp shot. To make the amp shot, we’re planning on using a hood or some other retractable system to redirect the note into the amp.
Finally, our climb
Our climb design is inspired by FRC 95’s 2022 climber.
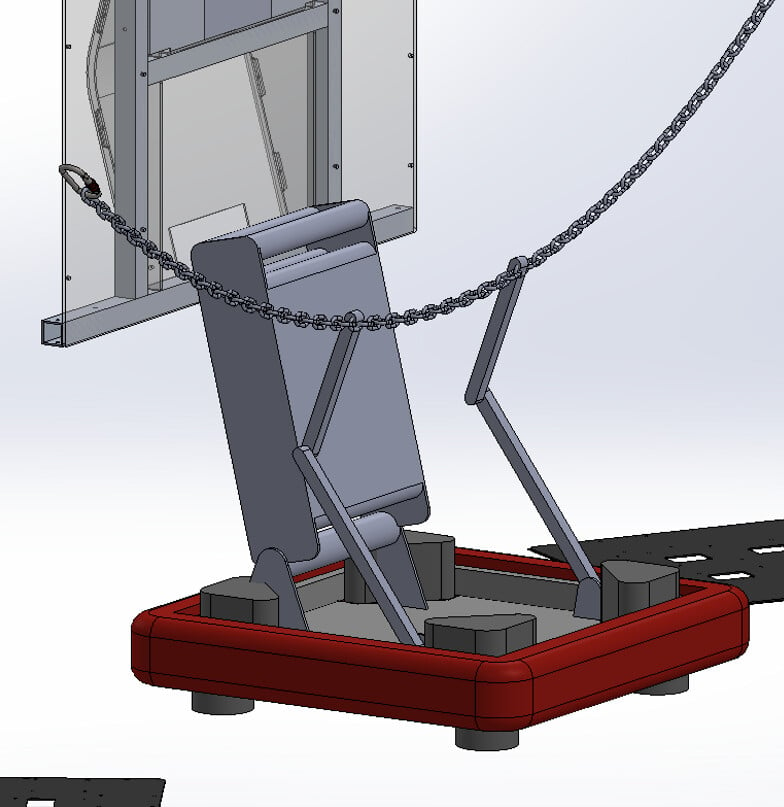
Although not pictured in this mockup, the climb will use torsion sprung arms regularly held down by a string attaching the hook of the arms to the drivebase. When we want to climb, we will extend the string, allowing the arms to extend up towards the chain. Pulling the arm back down with the string will complete our climb.
We’re hoping to ensure that our climb will bring the chain at the same level as our launcher pivot. Doing so should allow us to launch a note into the trap by first opening the trapdoor using our hood and then using the same hood to redirect the note similar to how we expect to score in the amp.
There’s our robot design! We’ve started CAD and programming work for each of the subsystems. One of our goals this year is try and reduce the time between concept and physical, working subsystem, so hopefully in future OA updates you’ll see these subsystems come to life soon! See you then!